The BIonics Beocme Finalists at The UniveRSITY of rhode islandOn March 14-16, Team 4909 - The Bionics competed at the University of Rhode Island District Event in Kingston, RI for Week 3 of the 2024 FIRST® Robotics Competition. This weekend-long competition took place at the Keaney Gymnasium and was the team’s third official event of the 2024 season. In the weeks prior to the competition, the team was able to focus on consistency. The software team updated code to improve the robot's performance during both automated and tele-operated periods and the drive team held extensive driver practices to consistently score game pieces with short cycle times. Like previous events, the match structure is composed of qualification matches, followed by a double-elimination playoff bracket. Team 4909 ended the first day of the competition undefeated and broke the event high score of 91 points in one match. After the end of qualification matches, The Bionics won 11 of 12 qualification matches and was tied in ranking points with the first-place team. However, the Bionics dropped down to 2nd place due to FRC's tiebreaking procedure. Despite this, Team 4909 captained the 2nd-seed alliance, partnering with Team 1058, “PVC Pirates” of Londonderry, NH and Team 8544, “Reinforcement” of Sutton, MA. During the playoffs, the alliance won three consecutive matches, moving on as event finalists. In the finals, the Bionics won their first match against the 1st-seed alliance. Unfortunately, this match did not count and had to be replayed due to a field error. Despite the previous success, the team's robot suddenly experienced a mechanical error in the drive train, causing the Bionics to lose the replay, and the following match. This ended the competition with the Bionics placing second, earning the title, "Event Finalists." Even though the Bionics did not take home a blue banner, URIDE was unarguably one of the team’s best performing competitions in team history.  Bionics Win Industrial Design AwarDDuring the award ceremony, the judges awarded Team 4909 the Industrial Design Award, presented by General Motors. This award, "celebrates excellence in marrying form, function, and aesthetics within the realm of robotics." The judges specifically complimented the team's implementation of industrial design principles, including the use of precise machining and a compact design. The Bionics' next competition will be the New England District Championship at The Big E fairgrounds in Springfield, MA from April 4-6. Published on 3/18/2024 by Daniel Darris-O'Connor
0 Comments
Team 4909 Places 3rd at the Granite State District Event in Salem, New HampshireOn March 1st and 2nd, Team 4909 - Billerica Bionics competed in the Granite State District Event for Week 1 of the 2024 FIRST® Robotics Competition. This weekend-long event was hosted at Salem High School in Salem, NH and was the Team’s first official event of the 2024 season. This competition attracted 35 high school teams from across New England, all aiming to take home a coveted blue banner. For this competition, high school students were challenged to build robots that operate in both autonomous and remote-controlled (tele-op) modes. Robots are required to pick up notes, ring-shaped game pieces and score them at precise targets across the game field. To score, teams have developed different ways to shoot and place game pieces. To score extra points in this year’s endgame challenge, robots must climb the stage, a field element located at the center of the field composed of a rigid structure with a metal chain linked across. Robots must attach to this element to lift off of the ground in order to receive points. In the competition, the match structure is composed of qualification matches, followed by a double-elimination playoff bracket. With a rough start on day one, Team 4909 ended up winning 7 out of 14 qualification matches, placing the team in 11th place. During alliance selection, Team 4909 partnered with Team 9443, “Aluminium Panthers” of West Newbury, MA and alliance captain Team 1922, “Oz-Ram” of Contoocook, New Hampshire to form the 4th-seed alliance. During the playoffs, the alliance won the first match. Unfortunately, the Bionic alliance lost the second match, dropping the team down to the lower bracket. The alliance won two consecutive matches in the lower bracket, but were ultimately defeated by the 2nd-seed alliance in the final match of the lower bracket. The Bionic alliance ended up placing 3rd of the eight alliances, and the team took home 46 district points, 10 more than the team’s first competition of the 2023 season. 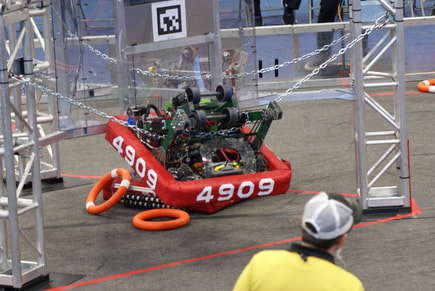 Team 4909 Wins the Judges’ Award
Sophomore Luis TEIxeira Wins Dean’s List
Team 4909’s next competition will be this Saturday and Sunday at the Bridgewater State University event in Bridgewater, MA.
Tomorrow our team is headed to Salem High School to compete at our first district event of the season! We are playing with 34 teams from New Hampshire, Massachusetts, Maine, and Vermont. The weekend's tentative schedule is as follows: Friday, March 1, 2024: - Opening Ceremonies: 10:30am - Qualification Matches: 11:00am - 7:00pm Saturday, March 2, 2024: - Opening Ceremonies: 9:00am - Qualification Matches: 9:30am - 12:30pm - Alliance Selections: 12:30pm - 1:00pm - Playoff Matches & Awards Ceremony: 2:00pm - 5:00pm *This schedule is subject to change. All times are estimated based on the flow of rounds.
Stay tuned for updates on our social media @team4909  Name: Hera Lewis
Title: Strategist Years on Team: 5 Years Areas of Focus and Responsibilities: "I manufacture and assemble the robot. I also play a role in strategy for our competitions.” Impact FIRST has had: “It has given me the skills for a career that I want. It has also pushed me out of my comfort zone to collaborate with other teams.” Favorite 4909 memory: “Winning the blue banner in my 8th grade year.” Plans After High School: "I want to go to college to study mechanical engineering." Ideal Job: Mechanical Engineer We’re down to just two weeks left in the build season! The past 2 weeks have been a big push for us, as we’re in the final stretch. All subsystem groups are now working on Rev3 of our robot.
Shooter: The beginning of last week was spent fine tuning the shooter geometry to optimize the hand off. Once CAD was finalized, members began manufacturing parts for Rev2. By Friday, assembly and integration of Rev2 was completed. Handoff and shooting capabilities were tested over the weekend. This week, the group tested the Rev2 shooter and started manufacturing Rev3. Testing of the shooter early in the week was very successful and demonstrated that the robot could score in the amp and speaker very well. Following minor tweaks to our CAD, Rev3 parts were powder coated and assembly began. In the coming meetings, we will test trap scoring.
Operations: Team Operations kicked off our build season fundraiser by raffling off 2 tickets to the Celtics vs. Thunder game on April 3rd. We sold tickets during BMHS basketball games throughout the past week. Additionally, preparations are underway for our Robot Reveal Night on February 26th. Invitations will be sent out soon, so mark your calendars!   Name: Yash Patel
Title: Scouting Lead Years on Team: 4 Years Areas of Focus and Responsibilities: I work on design and manufacturing. This year I have been working on the intake. Last year I worked on the climber and the scouting software.” Impact FIRST has had: “I was able to learn the engineering design process and the different tasks needed to build a robot.” Favorite 4909 memory: “In 2021, we were in a match the robot fell which caused us to make improvements to the climber. After that, we successfully made triple traversal with our alliance partners.” Plans After High School: I plan on going to college to study computer science. Ideal Job: Something related to computer science.  Name: Ayati Biswas
Title: Awards Lead Years on the Team: 3 Years Areas of Focus and Responsibilities on the Team: "All of the submitted awards are my responsibility. I make sure all the award materials are completed before the due dates. Mainly, I work on the Impact Awards submission so I work on the executive summary, essay, presentation, and the video." Team 4909's Impact: "The team has given me a sense of leadership that I have not been able to get anywhere else. I have also gotten a sense of family having gotten so much closer to the other team members." Plans after High School: "I plan on going to college to study biomedical engineering." Favorite 4909 Memory: "Winning the Team Sustainability Award at DCMP last year because it was exhilarating and validating for Team Operations." Ideal Job: "Run a biotech lab for bio-engineering."  Team Operations: This past week, Team Operations finalized our Hour of Code event. The event will be running from 5PM on Friday, February 9th at Billerica Memorial High School for students in grades 2-5. If you are interested in registering your student for this event, RSVP to team4909@gmail.com with your child’s name and grade. Spots are limited and parents are required to stay for the entirety of the event. Students finalized team banner designs for the 2023-24 season CRESCENDO and completed executive summaries for this year’s Impact Award submission.
 Intake: This week the Intake group made needed improvements to their Rev1 design to prepare for the manufacturing of our Rev2 robot. We made improvements to our design, making it more practical and compliant with competition rules. This included changing our motor mounts and redesigning parts of our intake to fit inside the frame perimeter. This resulted in us having to shift the intake geometry. In addition to this, one of our main problems from the Rev1 design was that the intake was dragging on the ground, which required slight redesign revisions. Finally, we worked with the shooter group to help finalize our plans on handing off notes between the intake and shooter mechanisms.  Shooter Subsystem The shooter group tested their first revision and gained a lot of useful information that will help them while designing Rev2. Students tested how note compression will affect the accuracy and distance of shooting notes, which helped determine the final dimensions of the shooter. After testing Rev1, CAD designs for Rev2 began. They worked with the climber group to figure out how the shooter will attach to the arm and power transmission in order to pivot. Due to their poor handoff between the intake to the shooter, they decided to change the feeder to a horizontal orientation instead of vertical one to help center the notes better.
 Shooter: Last week, the shooter group focused on maximizing scores through precise targeting of the speaker and amp field elements. To achieve this goal, the group designed and constructed a maxtube prototype to evaluate the necessary compression and power for accurate shots. Members fine-tuned the field element amp to ensure that the tests conducted reflected competition conditions as accurately as possible. The group also developed a control system test board specifically tailored to regulate motor speeds across varying RPM levels, which will greatly contribute to the overall efficiency and effectiveness of the robot during competition. Intake: Last week, the intake group brainstormed prototypes for intaking and catching notes. After testing, members discussed potential mechanism placement, thinking about swerve pod placement and bumper placement to determine the general width of the intake. They decided on an under the bumper intake for Rev 1 and are currently working on the geometry CAD for note pathway and roller placement.
Software: Last week, the software team began with working on drivetrain code. They then programmed the KitBot (built from parts provided by FRC KitBot that acts as a base for more complex systems) to tune speeds of the wheels. Members finished the week by working with April Tags, which are QR code-like elements used in FRC for vision processing. These laid the foundations for our competition robot code. This week, the software team continued to work on vision alignment and began programming a 7 point autonomous for CRESCENDO. As robot subsystems have started to take shape, they started coding the Rev 1 intake and shooter. Members also began enhancing last season’s swerve code to be better suited for this year’s robot.
Operations:
As competition season approaches in March, Team Operations has been making promotional material for our events. This year, members added a creative touch with CRESCENDO buttons made using our new button press. The group has also started designing this year’s banner for our competition pit. To reach our fundraising goal of $10k, members are actively planning raffles and applying for grants. In addition, students wrapped up pending tasks for the upcoming 'Hour of Code' event scheduled in a couple of weeks. Stay tuned for the opening of registration! After having an incredibly successful 2023 season, and with 47 team members this season, Team 4909 is ready to discover what this new year has in store for us as we “CRESCENDO” our way into the 2024 FIRST Robotics Competition! 2023 Training Program: This past fall, our team has focused on training new students as a part of the 2023 pre-season. Here is a recap of what we have done so far this academic year: Computer-aided Design (CAD) Training: Over the preseason, our team spent significant time training new members in CAD. CAD is a tool used to design parts before the manufacturing process. Members interested in learning CAD were shown the basics of modeling. Veteran members interested in advancing their CAD skills were given projects to work on with a partner. In the level 1 course, students made parts given a set of constraints without guidance. They learned how to navigate 3D space on a 2D screen in the design process. The students who completed this program have become proficient in CAD and will be able to contribute significantly during the 2024 season. Each group in the level 2 course built a subsystem for past FRC games. The course's objective was to go through the design process from scratch rather than build the system. Business Operations Training: During the preseason, Business Operations, “Team Ops’” trained students, “on the job,” focusing heavily on fundraising and outreach projects for the 2024 season. Team Ops worked with the rest of the team to host the New England Robotics Derby in Tewksbury this past October and ran the “12 Days of Christmas Raffle” where students sold tickets to family, friends and members of the public on their own and at O’Connor Hardware in Billerica, MA. Team Ops also began working on the team’s business plan, award submissions, as well as updating our team’s website and social media pages. Manufacturing Training: The manufacturing team concentrated on developing the skills that will be most required for build season. Members first learned how to read and interpret part sheets on basic machines. Students moved on to other machines in the shop and learned to use hand tools. This group worked on rebuilding our t-shirt cannon first built during a previous season. These students were challenged to use their knowledge learned from training to build a functioning robot. Software Training: During the preseason, rookie members were introduced to coding in Java through Codecademy. After building a foundation of basic coding knowledge, students progressed to controlling the robot directly. To get familiar with this environment, members programmed the robot to perform simple functions. Then they set up a limelight camera to automatically target April Tags, which are QR code-like elements used in FRC for vision processing. This involved learning how to use firmware and Application Programming Interfaces (API) to determine the distance between a target with just a camera.  Kickoff: At the start of this month, we kicked off the 2024 season at Billerica Memorial High School by watching this year’s game reveal; CRESCENDO presented by Haas. This marked the beginning of the 6-week build season, a period where teams design and build their robots from start to finish. This season, students are challenged to create a robot that can score points by delivering “notes,” an orange, donut-shaped object to dedicated scoring areas around the field. In the final 20 seconds of the match, the endgame challenge offers additional points if a robot can successfully climb the “stage” located at the center of the field. After watching FIRST’s stream of the game reveal, the team read through the game manual together to fully grasp the extent of the game and develop an action plan from what we learned. Below is the game animation and additional information about the game. Now, members will apply their knowledge learned over the preseason to design, manufacture and program a fully functioning robot to fulfill all the game requirements for this season.
Stay tuned for weekly updates! Build Season Schedule: Monday: 5:30pm - 9pm Tuesday: 5:30pm - 9pm Wednesday: No Meeting Thursday: No Meeting Friday: 2pm - 9pm Saturday: 9am - 3pm Sunday: No Meeting |