Team Operations: This past week, Team Operations finalized our Hour of Code event. The event will be running from 5PM on Friday, February 9th at Billerica Memorial High School for students in grades 2-5. If you are interested in registering your student for this event, RSVP to [email protected] with your child’s name and grade. Spots are limited and parents are required to stay for the entirety of the event. Students finalized team banner designs for the 2023-24 season CRESCENDO and completed executive summaries for this year’s Impact Award submission.
 Intake: This week the Intake group made needed improvements to their Rev1 design to prepare for the manufacturing of our Rev2 robot. We made improvements to our design, making it more practical and compliant with competition rules. This included changing our motor mounts and redesigning parts of our intake to fit inside the frame perimeter. This resulted in us having to shift the intake geometry. In addition to this, one of our main problems from the Rev1 design was that the intake was dragging on the ground, which required slight redesign revisions. Finally, we worked with the shooter group to help finalize our plans on handing off notes between the intake and shooter mechanisms.  Shooter Subsystem The shooter group tested their first revision and gained a lot of useful information that will help them while designing Rev2. Students tested how note compression will affect the accuracy and distance of shooting notes, which helped determine the final dimensions of the shooter. After testing Rev1, CAD designs for Rev2 began. They worked with the climber group to figure out how the shooter will attach to the arm and power transmission in order to pivot. Due to their poor handoff between the intake to the shooter, they decided to change the feeder to a horizontal orientation instead of vertical one to help center the notes better.
0 Comments
 Shooter: Last week, the shooter group focused on maximizing scores through precise targeting of the speaker and amp field elements. To achieve this goal, the group designed and constructed a maxtube prototype to evaluate the necessary compression and power for accurate shots. Members fine-tuned the field element amp to ensure that the tests conducted reflected competition conditions as accurately as possible. The group also developed a control system test board specifically tailored to regulate motor speeds across varying RPM levels, which will greatly contribute to the overall efficiency and effectiveness of the robot during competition. Intake: Last week, the intake group brainstormed prototypes for intaking and catching notes. After testing, members discussed potential mechanism placement, thinking about swerve pod placement and bumper placement to determine the general width of the intake. They decided on an under the bumper intake for Rev 1 and are currently working on the geometry CAD for note pathway and roller placement.
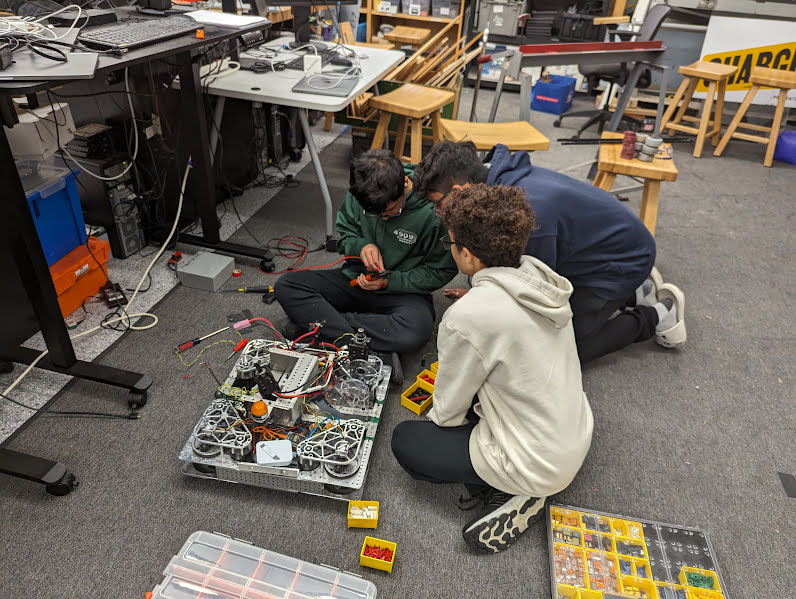
Software: Last week, the software team began with working on drivetrain code. They then programmed the KitBot (built from parts provided by FRC KitBot that acts as a base for more complex systems) to tune speeds of the wheels. Members finished the week by working with April Tags, which are QR code-like elements used in FRC for vision processing. These laid the foundations for our competition robot code. This week, the software team continued to work on vision alignment and began programming a 7 point autonomous for CRESCENDO. As robot subsystems have started to take shape, they started coding the Rev 1 intake and shooter. Members also began enhancing last season’s swerve code to be better suited for this year’s robot.
Operations:
As competition season approaches in March, Team Operations has been making promotional material for our events. This year, members added a creative touch with CRESCENDO buttons made using our new button press. The group has also started designing this year’s banner for our competition pit. To reach our fundraising goal of $10k, members are actively planning raffles and applying for grants. In addition, students wrapped up pending tasks for the upcoming 'Hour of Code' event scheduled in a couple of weeks. Stay tuned for the opening of registration! After having an incredibly successful 2023 season, and with 47 team members this season, Team 4909 is ready to discover what this new year has in store for us as we “CRESCENDO” our way into the 2024 FIRST Robotics Competition! 2023 Training Program: This past fall, our team has focused on training new students as a part of the 2023 pre-season. Here is a recap of what we have done so far this academic year: Computer-aided Design (CAD) Training: Over the preseason, our team spent significant time training new members in CAD. CAD is a tool used to design parts before the manufacturing process. Members interested in learning CAD were shown the basics of modeling. Veteran members interested in advancing their CAD skills were given projects to work on with a partner. In the level 1 course, students made parts given a set of constraints without guidance. They learned how to navigate 3D space on a 2D screen in the design process. The students who completed this program have become proficient in CAD and will be able to contribute significantly during the 2024 season. Each group in the level 2 course built a subsystem for past FRC games. The course's objective was to go through the design process from scratch rather than build the system. Business Operations Training: During the preseason, Business Operations, “Team Ops’” trained students, “on the job,” focusing heavily on fundraising and outreach projects for the 2024 season. Team Ops worked with the rest of the team to host the New England Robotics Derby in Tewksbury this past October and ran the “12 Days of Christmas Raffle” where students sold tickets to family, friends and members of the public on their own and at O’Connor Hardware in Billerica, MA. Team Ops also began working on the team’s business plan, award submissions, as well as updating our team’s website and social media pages. Manufacturing Training: The manufacturing team concentrated on developing the skills that will be most required for build season. Members first learned how to read and interpret part sheets on basic machines. Students moved on to other machines in the shop and learned to use hand tools. This group worked on rebuilding our t-shirt cannon first built during a previous season. These students were challenged to use their knowledge learned from training to build a functioning robot. Software Training: During the preseason, rookie members were introduced to coding in Java through Codecademy. After building a foundation of basic coding knowledge, students progressed to controlling the robot directly. To get familiar with this environment, members programmed the robot to perform simple functions. Then they set up a limelight camera to automatically target April Tags, which are QR code-like elements used in FRC for vision processing. This involved learning how to use firmware and Application Programming Interfaces (API) to determine the distance between a target with just a camera.  Kickoff: At the start of this month, we kicked off the 2024 season at Billerica Memorial High School by watching this year’s game reveal; CRESCENDO presented by Haas. This marked the beginning of the 6-week build season, a period where teams design and build their robots from start to finish. This season, students are challenged to create a robot that can score points by delivering “notes,” an orange, donut-shaped object to dedicated scoring areas around the field. In the final 20 seconds of the match, the endgame challenge offers additional points if a robot can successfully climb the “stage” located at the center of the field. After watching FIRST’s stream of the game reveal, the team read through the game manual together to fully grasp the extent of the game and develop an action plan from what we learned. Below is the game animation and additional information about the game. Now, members will apply their knowledge learned over the preseason to design, manufacture and program a fully functioning robot to fulfill all the game requirements for this season.
Stay tuned for weekly updates! Build Season Schedule: Monday: 5:30pm - 9pm Tuesday: 5:30pm - 9pm Wednesday: No Meeting Thursday: No Meeting Friday: 2pm - 9pm Saturday: 9am - 3pm Sunday: No Meeting We are holding a raffle for this year's holiday season! Unfortunately, last year, many team members couldn't afford to come to the FIRST World Championship in Houston, Texas. This raffle helps us offset prices for this year's competition, invest in more materials for our robots, and contributes to funding for the season. Participants can win over $100 worth of prizes! Each ticket is $5 or you can get 5 tickets for $20. Visit https://nerd-merch.square.site/product/12-days-of-christmas-raffle/102 or see any team member for purchases or more information. Thank you for your continuous support! 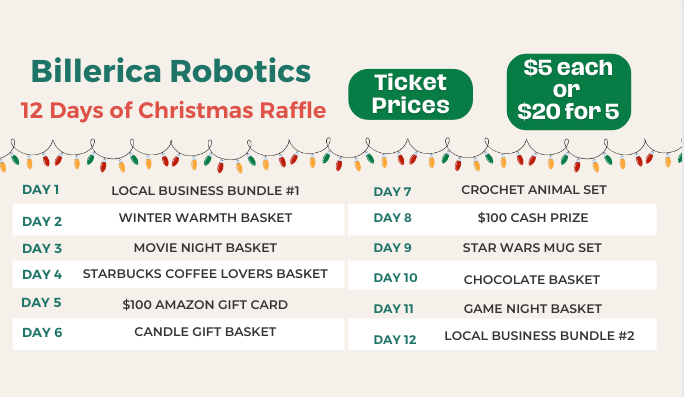 N.E.R.D. is back! We are ENERGIZED to co-host the 2023 New England Robotics Derby with Team 1474 Tewksbury Titans. 31 robots from all over New England will be coming together to play last season's game, CHARGED UP. Join us on Saturday, October 14th for a day of fun-filled competition at Tewksbury Memorial High School! Visit newenglandroboticsderby.com for more information, and may the Nerdiest Nerds win!
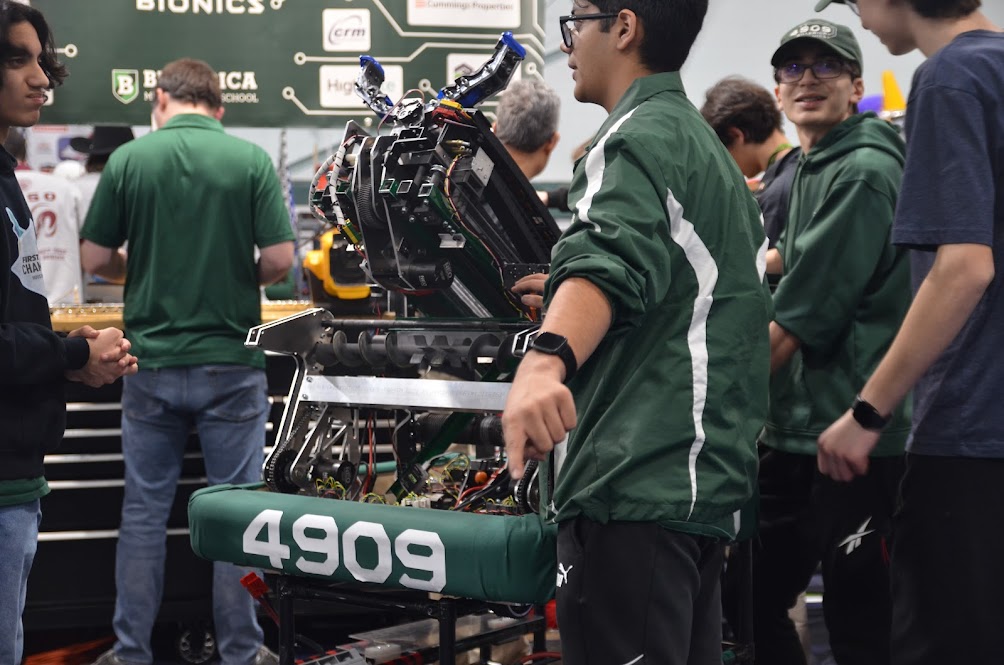
Walking into the Revere High School on the morning of March 25th, Billerica’s favorite robot, “Equinox”, had a brand new addition: a fully-functional cube shooter. Equinox now had the capability to now intake the cube game pieces and shoot them to their desired node during a match. Though we lost some matches, our victories ultimately landed us in 10th place by the time alliance selections came around. During alliance selections, we were the first pick of the fourth seed captained by Team 4041, the Iron Tigers. Team 5735 Control Freaks were also invited to join our alliance, which they accepted. The playoff tournament was thrilling, as the top teams of the competition took to the field to battle for the top spot. As the matches began, we scored a win against the 5th seed, but lost to the 1st seed in our next match, placing us in the lower bracket of the tournament. Tensions rising, the team entered the next match against the 2nd seed. Unfortunately, we lost the match 144-129 and were eliminated from the competition.
RIDE was the Bionics’ first official competition of the season, having won a pre-season event hosted by Bishop Guertin High School in Nashua, NH just a few weeks ago. The gym at Ponaganset High School was packed Saturday and Sunday with tech-savvy teens, encouraging coaches, and vivacious volunteers, all watching the playing field as robots raced to score points. These robots, designed and built by the high school students, operate in autonomous and remote control modes, picking up and placing game pieces in precise locations in the game field. To score extra points, the robots can balance on a rocking platform called a “charging station”.
The second day also had some lows and highs for Billerica’s favorite robot. Near the end of a match, Equinox tipped over, damaging the robot. “It was a really scary moment,” said team captain Anuva Agrawal. “But it was great that we could count on our pit crew to fix the robot quickly for the next match.” The team discovered that a communications problem with the field delayed control commands, causing the robot to jerk forward unexpectedly and fall. The FIRST head referee allowed a rematch, which the Bionics’ alliance won 105 to 84, putting Billerica in 5th place for the playoff tournament. The playoff tournament was thrilling at the top teams took to the field. The Bionics allied with two other teams to score a win in their first tournament match. Unfortunately, they lost their next two matches, eliminating them from the competition.
RIDE was an exciting event for humans and robots alike. The Billerica Bionics team is looking forward to the next competition on March 25th and 26th at Revere High School in Revere, MA. Attendance is free, and all are invited to attend and cheer on the team. “This was a tough competition,” said team member Abhinaba Goswami. “We’re going to do even better in the next game.”
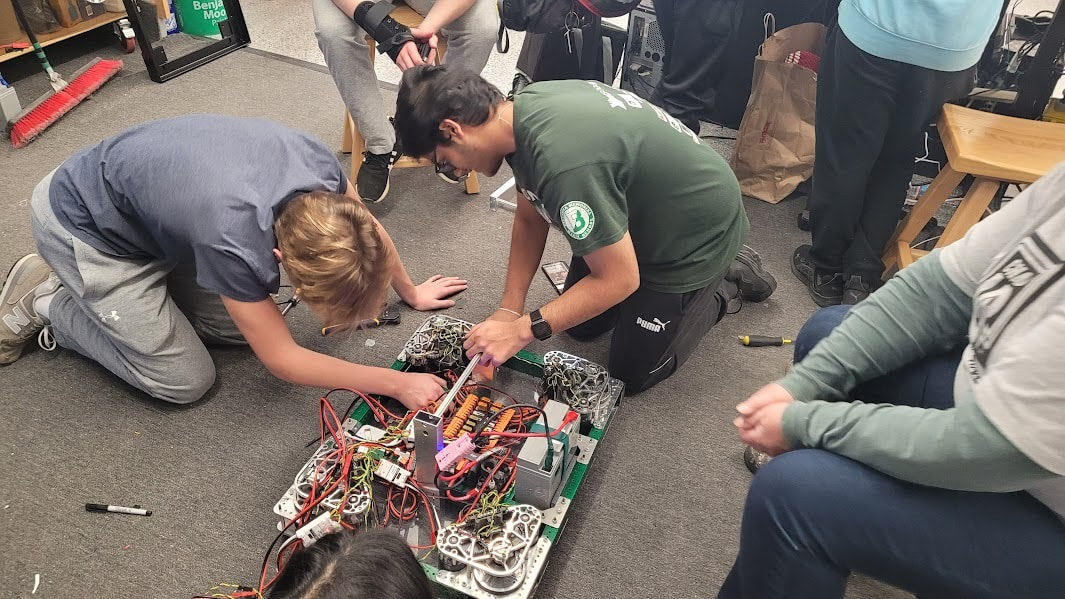
To stay updated on the latest Team 4909 - Billerica Bionics news, please follow @team4909 on Instagram, Twitter, and Facebook, or go to team4909.org. Software: Members began the week by working on code for the intake, wrist, and claw systems. The intake system contains spinning rollers that allow the operator to take in game pieces while the claw simultaneously manipulates these pieces to score. By moving the claw up and down, the wrist apparatus acts as a bridge between these two systems, allowing the robot to score quickly and efficiently.  Lift/Launch/Extend: Members continued testing the mechanism while integrating it with the other subsystems in preparation for the Week 0 Event at the end of the week. Intake: Over the final week of Build Season, members of the intake subgroup conducted preliminary tests of durability, speed, and efficiency with the system mounted on the robot for the first time. As the week progressed, students had to work around small problems, such as imprecision in certain areas. After Week 0, the group plans to continue testing and perfecting the mechanism before the team’s first district event.
Tomorrow our team is going to Bishop Guertin High School to compete at "Week 0"! Week 0 is a pre-season competition where we will get to play the CHARGED UP game for the first time ever! The day's tentative schedule is shown below:
8:30 - Opening Ceremonies 8:45 - Qualifying Matches 11:30 - Alliance Selection 12:15 - Playoff Matches 3:30 - Closing Ceremonies Make sure to stream the competition on Twitch tomorrow and keep up with our progress! www.twitch.tv/firstinspires  Name: Karan Rana
Title: Build Lead Years on the Team: 2 Years Areas of Focus and Responsibilities: "Helping lead the elevator team. Being a build lead I get to help lead a team of students to design and manufacture the elevator subsystem." Team 4909's Impact: "It's been able to teach me a lot about engineering more than any class would have. It has also taught me about leadership and I gained experience leading others to achieve something." Plans after High School: "Continue to study engineering and pursue a career in engineering specifically robotics." What FIRST Means to you: "FIRST is a group of people dedicated to a greater goal of being able to compete in competitions as a group. It also teaches individuals to collectively find priorities and solutions to challenges." Favorite 4909 Memory: "Being able to the robot climb for the first time last season and celebrating the achievements with my teammates." Ideal Job: "A leader in engineering projects specifically in robotics." |